




El procesador
es el “cerebro” del ordenador. Es el componente encargado de la ejecución
de las instrucciones de los programas. Todos los ordenadores tienen al menos
un procesador.
El procesador está formado por un conjunto de registros que almacenen datos, una
unidad aritmético-lógica que realiza operaciones con ellos y una unidad de control
que se encarga de coordinar a todos los componentes. Un reloj interno determina la
velocidad de trabajo de estos elementos internos.
Existen varios fabricantes de procesadores y no todos son compatibles entre sí. Cada
procesador implementa un conjunto de instrucciones diferentes, lo que puede hacer
que el código que se construye para un procesador no funcione en otro.
La potencia de los procesadores se suele medir a partir de su “velocidad”, pero hay
otros factores que hoyo en día son incluso más relevantes de cara al rendimiento final
del procesador, por lo que ya no tiene sentido fijarnos sólo en esta característica.
En los últimos años, la tecnología ha sufrido un gran cambio al permitir integrar varios
núcleos de procesamiento dentro del mismo procesador. A esta tecnología se la conoce
en general como tecnología de núcleos múltiples y permiten ejecutar en paralelo
dos programas simultáneamente, incrementando así el rendimiento del procesador.
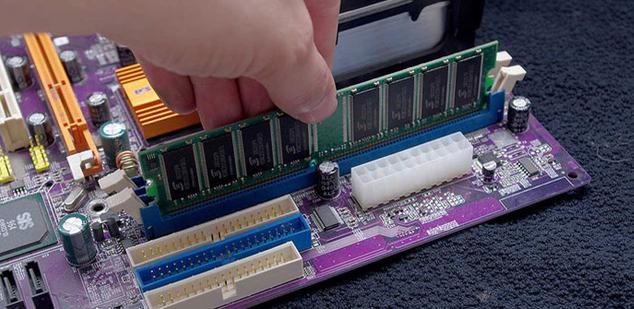
Funcionamiento del procesador
El procesador no es de una sola pieza. Está formado por una serie de componentes
cada uno de los cuales tiene una función concreta. El procesador trabaja de forma
conjunta con la memoria RAM, que es la que almacena las instrucciones y los datos de
todos los programas que se están ejecutando en el ordenador en un momento dado.
Componentes de un procesador
Un procesador está formado por una serie de componentes que trabajan de forma
coordinada par ejecutar las instrucciones que forman los programas. Estos componentes
son los siguientes:
• Unidad de interface con el bus: es quien recibe las instrucciones y los datos directamente
de la memoria RAM a través del bus del sistema (o front side bus
-FSB-).
• Unidad de decodificación: se encarga de decodificar la instrucción para determinar
a qué instrucción corresponde la secuencia de bits que acaba de leer
y saber de esta forma qué tiene que hacer el procesador con los datos leídos.
• Unidad aritmético-lógica (ALU): en ocasiones las instrucciones requieren de la
realización de algún cálculo. Este es el componente básico encargado de realizar
operaciones matemáticas (aritméticas y lógicas) con los datos.
• Registros: almacenan temporalmente los datos de la instrucción que está ejecutando
en ese momento la unidad aritmético-lógica. El tamaño de estos registros
se mide en bits y determina el tamaño máximo de los datos que puede manipular
en una sola operación. Piensa que son unas casillas que se rellenan con unos
y ceros. Si tenemos más cifras que casillas, tendremos que hacer la operación
en 2 ó más veces porque no nos caben todos los datos.
En los procesadores actuales estos registros son de 32 o de 64 bits. Por esto decimos
que un procesador es de 64 bits. Fíjate que, al doblar el tamaño de los
registros necesitaremos la mitad de accesos en el caso de que las instrucciones
no quepan en los registros, con lo que el ordenador podría llegar a ser el doble
de rápido.
• Reloj interno: todos lo componentes anteriormente descritos trabajan de forma
sincronizada por impulsos. El reloj es el encargado de proporcionar los pulsos para
que todos los elementos se sincronicen.
• Unidad de control (UC): es la unidad que coordina el funcionamiento de todas
las anteriores, indicando de quién es el turno de operar en cada instante.
A continuación se describe el proceso de ejecución de una instrucción empleando
estos componentes.
Ejecución de una instrucción
El proceso de ejecución de una instrucción es el siguiente (ver Figura 1):
1. la unidad de interface con el bus lee la siguiente instrucción del programa y los
datos asociados, que le llegan a través del FSB.
2. la unidad de decodificación traduce la instrucción y se la pasa a la unidad de
control para que decida qué hacer con ella
2
3. si la instrucción necesita ejecutar alguna operación matemática, se la pasa a la
ALU
4. la ALU realiza la operación y deja el resultado en un registro
5. la unidad de control le pasa el resultado de la operación a la unidad de interfaz
con el bus y le da la orden de guardarla en la memoria
6. la unidad de interfaz con el bus escribe en la memoria RAM el resultado de la
ejecución de la instrucción a través del FSB
Este comportamiento se ejecuta de forma continua en un bucle hasta que se alcanza
el final del programa.

Caracterización
La visión de los componentes del procesador es una visión interna. Como usuarios de
un ordenador, es necesario para saber cómo funciona y su relación con el resto de
componentes del ordenador, especialmente la memoria RAM y el bus del sistema. Pero
habitualmente el procesador se ve como una caja negra que procesa instrucciones,
sin que necesitemos conocer más detalles.
Cuando analizamos un procesador, las características en las que nos fijamos son las
siguientes.
Arquitectura
La arquitectura de un procesador hace referencia a su diseño interno. Básicamente
podemos encontrar dos familias de arquitecturas: RISC y CISC. Las arquitecturas RISC (reduced instruction set computer)se basan, como su propio nombre indica, en un conjunto de instrucciones reducido y simple, pero eso no quiere decir que estos procesadores sean poco potentes. Todo lo contrario: la simplicidad de su diseño favorece que las instrucciones se ejecuten rápidamente, aunque sea necesario ejecutar varias de ellas para tener el mismo resultado que con una sola instrucción más compleja. Es la base de los procesadores que suelen incorporar los grandes sistemas como los mainframes debido a las posibilidades de paralelismo y de multi-tarea real que ofrece su diseño. Los procesadores ARM, incorporados en multitud de plataformas móviles y de videojuegos emplean también esta arquitectura. Por otra parte, las arquitecturas CISC (complex instruction set computer) usan una aproximación distinta. Disponen de un juego de instrucciones complejo y muy elaborado, incluyendo hasta instrucciones especiales para la gestión de datos multimedia. Son las arquitecturas en las que se basan los procesadores para los ordenadores personales,como los de Intel o AMD.
Equivalencias entre procesadores
De todos los fabricantes de procesadores Intel y AMD son los fabricantes de procesadores
más conocidos por usarse casi de forma exclusiva en los ordenadores personales.
Cada uno de ellos dispone de una amplia gama de procesadores, cada uno de los
cuales está destinado a un tipo de ordenador distinto (ver Tabla 1).
Respecto a los ordenadores de sobremesa, suele haber algunos procesadores para
equipos de gama baja: usuarios que no necesitan mucha potencia porque su uso del
ordenador va a ser simple: procesamiento de textos, navegación básica (webs, correo,
uso de redes sociales…) y reproducción de elementos multimedia. Si se desea
realizar tareas más complejas es necesario acudir a los procesadores para los equipos
de gama media y alta. La diferencia entre estos últimos está en el tipo de aplicaciones
que se van a ejecutar. Por ejemplo, los juegos son una de las aplicaciones más exigentes
que tenemos hoy en día.
Otro grupo son los procesadores diseñador para la computación móvil. para los portátiles
se suelen emplear los mismos procesadores de los equipos de escritorio, adaptados para un menor consumo y también un menor calentamiento.3 El extremo son los procesadores para netbooks, donde los procesadores ofrecen un consumo mínimo
de escritorio para disipar todo el calor que genera el procesador.
pero a cambio de reducir también mucho las prestaciones. Estos equipos están pensados
como un segundo ordenador, para usarlo de forma puntual en desplazamientos.
Por último, existe un grupo de procesadores de alto rendimiento para equipos de gama
muy alta, normalmente servidores y estaciones de trabajo.
Tipo de equipo Intel AMD

PROCESADORES INTEL
Intel 4004:
un CPU de 4bits, fue el primer microprocesador en un simple chip, así como el primerodisponible comercialmente. Aproximadamente al mismo tiempo, algunos otros diseños de CPU encircuito integrado, tales como el militar F14 CADC de 1970, fueron implementados como chipsets,es decir constelaciones de múltiples chips.
Intel 8008:
El i8008 emplea direcciones de 14 bits, pudiendo direccionar hasta 16 KB de memoria.El circuito integrado del i8008, limitado por las 18 patillas de su encapsulado DIP, tiene un un buscompartido de datos y direcciones de 8 bits, por lo que necesita una gran cantidad de circuiteríaexterna para poder ser utilizado. El i8008 puede acceder a 8 puertos de entrada y 24 de salida.
Intel 8080:
fue un microprocesador temprano diseñado y fabricado por Intel. El CPU de 8 bits fuelanzado en abril de 1974. Corría a 2 MHz, y generalmente se le considera el primer diseño de CPUmicroprocesador verdaderamente usable.
Intel 80286
: es un microprocesador de 16 bits de la familia x86, que fue lanzado al mercado por Intel el 1 de febrero de 1982. Cuenta con 134.000 transistores.
Intel 80386
: es un microprocesador CISC con arquitectura x86. Durante su diseño se lo llamó 'P3',debido a que era el prototipo de la tercera generación x86. El i386 fue empleado como la unidadcentral de proceso de muchos ordenadores personales desde mediados de los años 80 hastaprincipios de los 90.
Intel Pentium:
con velocidades iniciales de 60 y 66 MHz, 3.100.000 transistores, cache interno de8 KiB para datos y 8 KiB para instrucciones; sucediendo al procesador Intel 80486. Intel no lollamó 586 debido a que no es posible registrar una marca compuesta solamente de números.
Pentium Pro:
al principio tenía una caché desde 256 KiB hasta 512 KiB en el encapsulado, hastala versión de 1 MiB introducida posteriormente. Todas las versiones eran caras, particularmenteaquellas que tenían más de 256 KiB de caché.
El Pentium II:
es un microprocesador con arquitectura x86 diseñado por Intel, introducido en elmercado el 7 de mayo de 1997. Está basado en una versión modificada del núcleo P6, usado por primera vez en el Intel Pentium Pro.
Pentium III:
es un microprocesador de arquitectura i686 fabricado y distribuido por Intel; el cual esuna modificación del Pentium Pro. Fue lanzado el 26 de febrero de 1999.
Pentium 4:
el Pentium 4 original, denominado Willamette, trabajaba a 1,4 y 1,5 GHz; y fue lanzadoel 20 de noviembre de 2000.1 El 8 de agosto de 2008 se realiza el último envío de Pentium 4
Intel Core Duo:
es un microprocesador de sexta generación lanzado en enero del 2006 por Intel,posterior al Pentium D y antecesor al Core 2 Duo. Dispone de dos núcleos de ejecución lo cualhace de este procesador especial para las aplicaciones de subprocesos múltiples y paramultitarea. Puede ejecutar varias aplicaciones exigentes simultáneamente, como juegos congráficos potentes o programas que requieran muchos cálculos, al mismo tiempo que permitedescargar música o analizar el PC con un antivirus en segundo plano.
Intel Core i3 (Nehalem):
son procesadores de doble núcleo con procesador gráfico integrado, laGPU, denominada Intel HD que funciona a 733 MHz. Poseen 4 MiB de caché de nivel 2, ycontrolador de memoria para DDR3 hasta 1,33 GHz. La función Turbo Boost no está habilitada,pero la tecnología Hyper-Threading se encuentra activada.
PROCESADORES AMD
Athlon
: El procesador Athlon se lanzó al mercado el 21 de agosto de 1999. Estuvo disponible inicialmenteen versiones de 500 a 650 MHz, pero después alcanzó velocidades de hasta 1 GHz. En términoseconómicos el Athlon fue un éxito, no sólo por méritos propios y su bajo precio comparado con lacompetencia, sino también por los problemas de producción de Intel en ese momento. El Athlon secomercializó hasta enero de 2002.
Sempron
: El Sempron es una categoría de microprocesador de baja gama fabricado por AMD. El AMDSempron el principal competidor es el procesador Celeron de Intel. Las primeras versiones fueron lanzadasal mercado en agosto de 2004.Las versiones iniciales de este procesador estaban basadas con una caché de segundo nivel de 256 KiB yun bus de 333 MHz (FSB 166 MHz). Disponía en un principio de 1,4 GHz, posteriormente hubo versionesde 2,8 GHz
Athlon 64 X2
: El AMD Athlon 64 X2 es un microprocesador de 64 bits Multi núcleo producido por AMD. Losnuevos procesadores que aparecieron en el mes de julio de 2006 contaron con soporte para memoriaDDR2, e incluyeron tecnologías de virtualización y mejoras en el consumo de energía.La principal característica de estos procesadores es que contienen dos núcleos y pueden procesar variastareas a la vez rindiendo mucho mejor que los procesadores de un único núcleo. Además su arquitecturaes de 64-bits.
Phenom 64 (X3 y X4)
: Phenom es el nombre dado a la primera generación de procesadores de tres ycuatro núcleos. Este nombre fue dado a conocer a finales de abril del 2007, reemplazando así a la serie dealto rendimiento de AMD (Athlon 64 X2). Los primeros dos modelos de la serie 8000 (Phenom X3 8400 a2,1 GHz y el X3 8600 a 2,3 GHz) fueron lanzados al mercado en marzo del 2008. Estos microprocesadorescuentan con tres núcleos (en realidad cuatro, con uno de ellos desactivado) y AMD afirma que mejoran elrendimiento hasta en un 30% respecto a un microprocesador AMD de doble núcleo a igual frecuencia,otorgándole al usuario una mejor experiencia de Alta definición (HD) con soporte para los más recientes yexigentes formatos.
Phenom II
: Phenom II es el nombre dado por AMD a una familia de microprocesadores de alta gama lacual reemplaza al Phenom original. La versión de transición del Phenom II, , fue lanzada en diciembre de2008, en tanto que la versión para Socket AM3 con soporte para RAM DDR3 fue lanzada el 9 de febrero de2009.Este procesador, se encuentra con velocidades desde 2.5 GHz a 3.6 GHz, soportamemorias del tipo DDR3,tiene versiones con memoria chache de hasta 6MB, y además, sus versiones varían desde X2, X3, X4 yX6, este ultimo con 6 núcleos, y un rendimiento optimo.









.jpg)













